 |
| October 11, 2016 | Volume 12 Issue 38 |
Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Why polymers outperform metals in precision gearing
By Georg Bartosch, President, INTECH Powercore Corp.
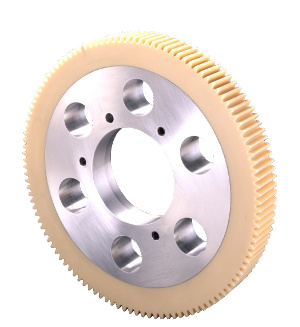
Fig. 1. Spur gear with 19-in. OD and 2.5-in. face width.
Gears, especially in open gearing applications, share a set of well-known performance problems that crop up again and again across many different applications. The most common ones include excessive noise, vibration, heat, weight, and corrosion. Gears also tend to be either over-lubricated or subject to wear, which respectively causes contamination from grease or metal particles. At best, all these performance issues will result in gears that are expensive to maintain. At worst, they will cause gears to fail prematurely, driving costs even higher.
You can solve all of these problems with good gear design practices. Unfortunately, even the best engineers sometimes forget a vitally important design strategy: picking the right gear materials for the job. All too often, applications with high forces automatically get metal gears, while lightly loaded applications may get either metal or injection-molded plastic gear sets.
There's a third material option that should get more engineering attention. Precision gearing can also be machined from advanced polymers. Whether combined with a metal structural hub or used in purely plastic gearing, precision-machined polymers can offer a long, lube-free life in packaging, paper converting, food processing, medical, and semiconductor machines. Not only are these gears quieter than the metal gears they can often replace, but they're also more efficient thanks to their low friction. Typically, precision-machined polymer gears will improve torque transmission efficiency by 3 percent or better.
We've designed and manufactured many thousands of machined polymer gear sets over the years, among them spur, helical, bevel, and worm gears. We've designed these gears in gravity cast nylon, acetal, and other engineering polymers, both with and without metal structural hubs. And what we've learned is that some gear applications really don't need our polymer gear technology.
Indeed, if your application runs trouble-free with either traditional metal or injection-molded gears, our cut polymer gears probably won't deliver much value.
But cut polymer gears quickly gain a huge performance and cost edge when other types of gears are too noisy, too shaky, too heavy, too hot, too rusty, or too greasy. Here's a look at five of these applications:
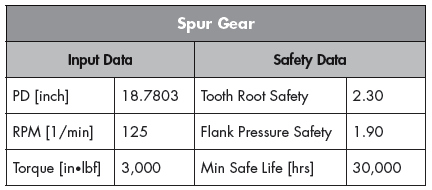
1. Robust spur gear
For a 25-hp drive on a high-speed paper converting line, where grease-free operation is a must, we created a hybrid polymer gear (Fig. 1) that can withstand the high shock loads from a full e-stop with the line moving at 180 m/min. At this speed, the gear has a high pitch line velocity that, in combination with the high torque, generates heat. And in spite of the high forces and heat, the gear needed a two-year wear life.
Our design solution involved both the gear teeth and the hub. Based on our gear optimization calculations, we subtly widened the teeth so they would hold up to the e-stop forces. We then combined the polymer gear surfaces with a large aluminum hub. It not only conducts heat away from the gear surfaces but also has a hole pattern that promotes additional cooling -- by increasing the surface area for heat dissipation and creating a fanning effect.
2. Lube-free helical drive lowers noise -- and inertia
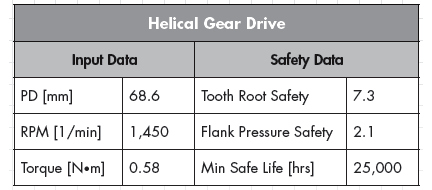
Surgeons won't stand for sloppy, noisy instruments in their operating rooms, which sets the bar very high on the gears that drive surgical robots. To reduce noise in metal gears, engineers specify high-precision ground helical gears. By selecting a polymer as the gear material, we were able to reduce noise by an additional 6dBa. We recently produced a very precise polymer-and-aluminum helical drive (Fig. 2) that helps one surgical robot reduce noise and maintain its positioning accuracy.

Fig. 2. Helical gear drive with 68-mm, 45-mm, and 50-mm ODs and a 12.7-mm face width.
Produced to AGMA 11 accuracy standards, the precision gear drive has virtually no backlash at operating temperatures. That's unusual for conventional plastic gears, which typically have about twice as much backlash as a comparable metal gear. The reason has to do with the dimensional instability of most engineering plastics used for gears. To compensate for growth from moisture absorption or thermal expansion, conventional plastic gears require a substantial undercut, which in turn introduces some positioning slop.
Our helical gear design is different. We produce the gears from high-performance polymers that don't absorb moisture, and the integral metal core reduces expansion at the robot's operating temperatures. So we were able to do away with that undercut -- and the backlash that goes along with it.
While the focus was initially on backlash reduction and gear mesh accuracy, we also significantly reduced the system's inertia. Low inertia helps make the robotic system even more responsive to positioning commands, which is especially important when surgical instruments are remotely manipulated in the patient's body. In this case, the low mass of the polymer and aluminum gearing materials reduced inertia by a factor of seven compared to steel gears.
One of the key design challenges for this gear drive involved thermal management. With a maximum pitch line velocity of 5.2 m/sec, the gears would generate an excessive amount of heat within their compact housing. What's more, we were not able to count on lubricants to reduce the friction, since these gears have to run for five years without a drop of oil. Our solution to the thermal management problems included both a tooth-form modification and the smart use of materials.
The proprietary tooth-form modification involves an increase in the pressure angle of the helical teeth. By rounding the tooth flanks for a reduction in sliding movement between mating teeth, the increased pressure angle limits friction and heat development. The result is a gear that not only runs cooler but also offers 20 percent more wear life than an unmodified gear.
The pressure angle modification also makes the tooth wider at its root, increasing the gear's load-bearing capacity by up to 18 percent. This important feature helped us to reduce the plastic gear's width and fit the gear into the available housing space.
As for materials, we relied heavily on aluminum to dissipate heat. We not only used it for the polymer gear hubs but also the entire middle gear. The aluminum hubs of the polymer gears were given lightening holes that help cool the gears -- while also contributing to the inertia reduction.
The middle gear, which is coated with PTFE-based coating to reduce friction, was likewise hollowed out to reduce weight. The biggest gear in the set ended up weighing just 5 oz thanks to the removal of material whenever possible.
3. No lube for lightweight robot gear drive
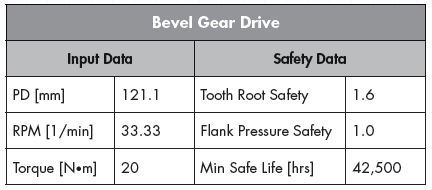
The need to eliminate lubricant while keeping gear weight to a minimum also tipped the scales toward polymers in a bevel gear drive for an automotive paint robot. This robotic system cannot use lubricants because they could potentially ruin the paint job. And because the gear drive is contained within the robot arm, it had to be as light as possible.

Fig. 3. Bevel gear drive with a 122.8-mm OD and a 15-mm face width.
To meet these design requirements, we created a gear from a gravity cast nylon (Fig. 3). It can run without lube in this application for five years. And with a specific weight of 1.03 g/cm3, this material is seven times lighter than metal. One of the gears in the drive, for example, weighs just 5.3 oz compared to 2.5 lb for a comparable metal gear.
Aside from the weight savings, gravity cast nylon also provides electrical insulation for the electrostatic paint process and remains dimensionally stable at elevated temperatures and humidities. These properties make it well-suited to the environment inside the paint booth.
4. Self-lubricating worm gear resists chemical exposure, heat
Yet another lubrication-sensitive gear application can be found on the conveyor systems for solar wafer manufacturing. Much like semiconductors, solar wafers can't tolerate any in-process contamination from lubricants, so the use of self-lubricating polymer gears to drive each roll in a multi-roller conveyer seemed like a natural choice.

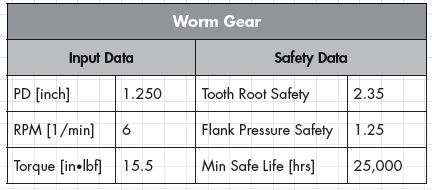
Fig. 4. Worm gear with a 1.374-in. OD and a 0.313-in. face width.
However, we also had to contend with elevated temperatures and chemical exposure in this application, because the conveyors carry the wafers through an 80°C silicon-coating oven. The heat and silicon vapors would rule out many polymers, but not nylon when used in a hybrid construction with a steel hub.
Gravity cast nylon withstands continuous chemical exposures, including silicon vapors. To manage the heat, we paired that polymer with a stainless steel core that we cast into the center of the gear blank (Fig. 4). The steel core reduces the thermal expansion of the polymer outer gear surface by about 50 percent. Without the metal core, an all-polymer gear would have experienced dimensional changes at elevated temperatures, resulting in gear binding. The metal core also eliminates a thermal-expansion mismatch between the gear and the shaft. An all-plastic gear would have pulled away from the shaft as temperatures increased.
For the worm in this system, we selected a 316 stainless steel. The material combination of gravity cast nylon and stainless steel keeps friction low for a gear that can last 10 years without significant wear in this light-duty application.
5. Internal gear for dental imaging
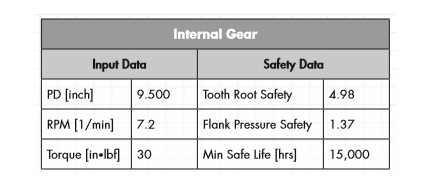
Medical and dental imaging systems can be extremely sensitive to vibration and noise, which can negatively affect image quality and patient comfort. So we set out to design a very smooth, quiet gear drive for a dental X-ray system. The drive consists of a polymer ring that's geared on its inside diameter and mounted to the X-ray housing (Fig. 5A). A spring-loaded pinion travels around the geared surface to position an X-ray head relative to the patient's head.
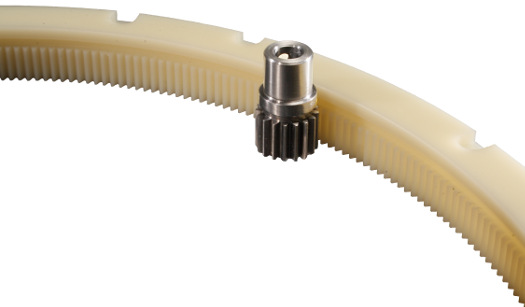
Fig. 5A. Internal gear with a 9.444-in. ID and a face width of 0.375 in.
This application started off with conventionally designed gears, but these were causing "chatter" as the imaging head moved along the ring. This chatter registered as lines in the finished image. When we analyzed the gearing imaging-head system in depth, we found that the strong spring force was pulling the pinion toward the ring gear, taking up all the tooth clearance. The gears were bottoming out, creating the chatter, so we had to design a system that would keep the gears running on a proper center distance -- that is, on their pitch line.
We started by creating a pitch line control mechanism (Fig. 5B) that consists of two rolling surfaces machined on each gear next to the teeth.
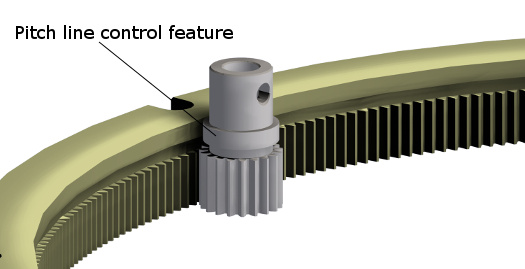
Fig. 5B.
Each of these surfaces picks up the pitch diameter of its respective gear. This way, the teeth can only engage as far as the pitch line since the spring load is carried on the rolling surfaces. The end result is that the gears maintain the correct center distance at all times.
The gravity cast nylon gear ring also helped reduce noise and vibration, thanks to its intrinsic damping properties. The gear design also had to meet a five-year wear life requirement.
Source: INTECH Powercore Corp.
Published: October 2016
Rate this article
View our terms of use and privacy policy